
FASTECH Ezi-SERVO II: Driver servo hỗ trợ truyền thông EtherCAT

Mã đặt hàng:
Động cơ Servo: | Drive điều khiển:
Động cơ Servo: | Drive điều khiển:
EzM2-20-F series | EzS2-EC-20 series
EzM2-28-D series | EzS2-EC-28 series
EzM2-35-D series | EzS2-EC-35 series
EzM2-42-A series | zS2-EC-42 series
EzM2-56-A series | EzS2-EC-56 series
EzM2-60-A series | EzS2-EC-60 series
EzM2-86-A series | EzS2-EC-86 series
Thông số kỹ thuật:
Input Voltage: 24VDC ±10% 40~70 VDC
Control Method: Closed loop control with 32bit MCU
Current Comsumption: Max 500mA (Except motor current)
Operating Condition: Ambient Temperature · In Use: 0~50˚C
· In Storage: -20~70˚C
Humidity · In Use: 35~85% RH (Non-Condensing)
· In Storage: 10~90% RH (Non-Condensing)
Vib. Resist 0.5g
Function Rotation Speed 0~3,000 [rpm]*1
Resolution [ppr] 4,000/Rev. Encoder model: 500 1,000 1,600 2,000 3,600 5,000 6,400 7,200 10,000 4,000
10,000/Rev. Encoder model: 500 1,000 1,600 2,000 3,600 5,000 6,400 7,200 10,000
16,000/Rev. Encoder model: 500 1,000 1,600 2,000 3,600 5,000 6,400 7,200 10,000 16,000
20,000/Rev. Encoder model: 500 1,000 1,600 2,000 3,600 5,000 6,400 7,200 10,000 20,000
(Selectable by parameter)
Protection Functions Over Current Error, Over Speed Error, Position Tracking Error, Over Load Error, Over Temperature Error, Over Regenerated Voltage Error, Motor Connect Error, Encoder Connect Error, In-Position Error, ROM Error, Position Overflow Error
LED Display Power status, In-Position status, Servo On status, Alarm status
EtherCAT Supported Protocol CoE (CiA402 Drive Profile), FoE (Firmware Download)
Supported Mode Profile Position Mode, Homing Mode, Cyclic Synchronous Position Mode
Synchronization Free Run, SM Event, DC SYNC Event
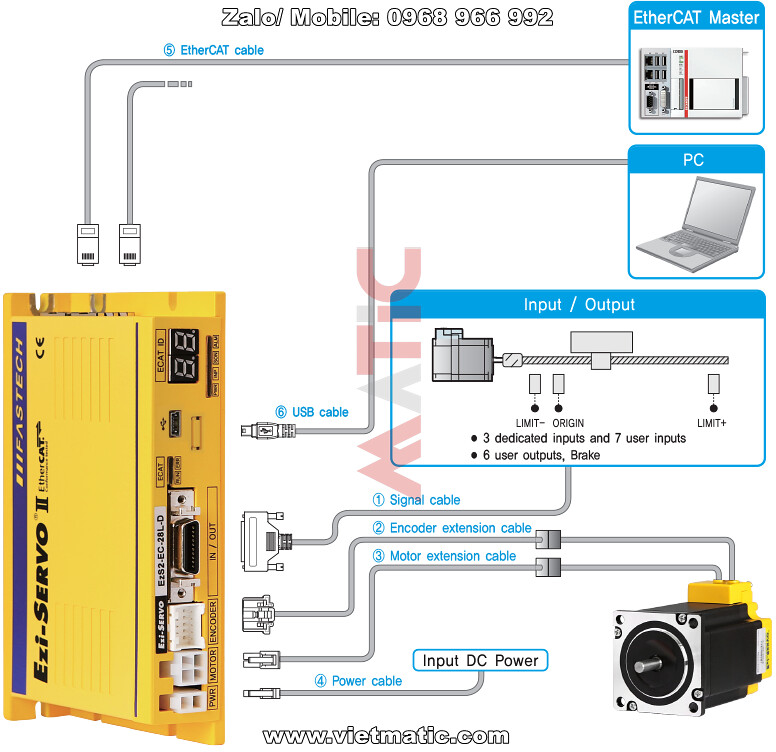
I/O Signal Input Signal 3 dedicated inputs (LIMIT+, LIMIT-, ORIGIN), 7 user inputs (Photocoupler Input)
Output Signal 6 user outputs (Photocoupler Output), Brake
Ứng dụng minh họa:
Lập trình điều khiển FASTECH Ezi-SERVO II bằng PLC Omron NX1P2 qua cổng EtherCAT
Đăng nhận xét Blogger Facebook